

Medical
Robot
A Handheld Robot is a compact, portable robotic device designed for tasks requiring mobility and manual operation. It integrates sensors, actuators, and control systems to assist users in precise tasks such as surgery, inspection, or industrial applications. Handheld robots enhance human capabilities by providing stability, precision, and intelligent automation in various fields.
Handheld Bio-Robot Pen
In-situ Bioprinting Adaptive to In-Vivo-Mimicking Environment
We developed a real-time table-top bio-printing control strategy for environments mimicking real biological surfaces, involving adaptive path planning and compensation for moving surfaces.
Scan-Speed-Robust Adaptive Control for Handheld In-Situ Bioprinting
In order to maintain a constant line width during in-situ bio-printing using handheld printers regardless of user error, we developed an adaptive bio-printing control strategy that uses the scan speed and current line width to control the flow rate, resulting in a substantial improvement in line width consistency during freehand bioprinting.
Multi-DOF In-Situ Bioprinting Robot Pen
1-DOF Tooltip Height Control


In in-situ bio-printing, maintaining a consistent distance between the nozzle and various surface geometries is crucial for ensuring uniform thickness and preventing damage from collisions. In particular, when using handheld printers, a system to compensate for nozzle height fluctuations caused by hand tremors is essential. To achieve this, we developed a handheld one-axis manipulator equipped with a miniature leads crew and a laser displacement sensor to precisely control the nozzle height.
Small Scale Endoscopic SLAM



This technology replaces the Optical Tracker by utilizing Visual-Inertial Odometry (VIO), which fuses stereo and IMU data for robust pose estimation without occlusion issues. Additionally, it integrates endoscopic images using VIO-based poses, expanding the workspace view for real-time 3D reconstruction and enhanced visualization
Handheld Brain Tumor Surgical Robot
.png)
.png)
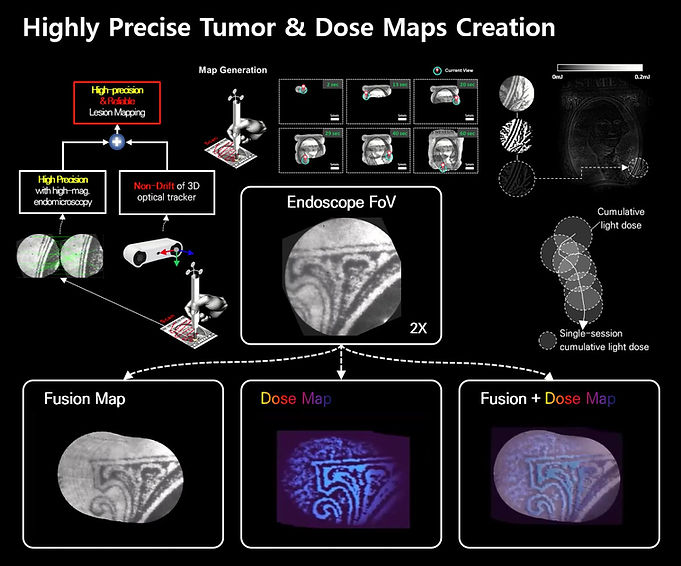
Tumor SLAM
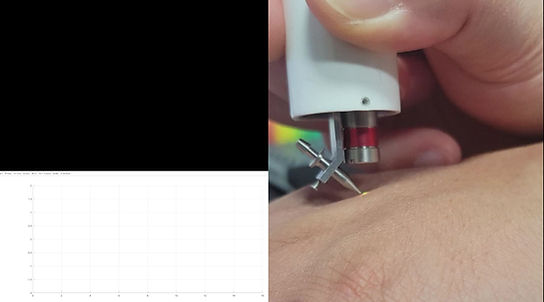
This technology overcomes the limited field of view in high-magnification endomicroscopy by integrating a SLAM method with a dose control algorithm. It enables precise identification of entire lesions while regulating light exposure during handheld scanning.
SLAM based Dose Control


Active Tremor Cancellation of Handheld Micro-Surgery Robot

Prediction of Voluntary Motion Using Decomposition-and-Ensemble Framework With Deep Neural Networks
Unlike traditional surgical robots, the handheld microsurgical robot floats in the air, controlled by the surgeon's hand. A fundamental problem when floating in the air is that the robot directly reflects hand tremors. To solve this, tremors occurring in the 6~14 Hz band must be eliminated, and the original signal occurring below 2 Hz should be utilized for control. Various filter algorithms are being applied to analyze and filter out the signals that include hand tremors, and active research is being conducted to effectively dampen these tremors and minimize time delay.
Force Control of Handheld Micro-surgery Robot
To effectively remove a brain tumor, a surgeon must use a handheld surgical robot equipped with a contact camera, bringing it to the surgical site and performing image-based intelligent control. To acquire enhanced images through the camera without causing injury to soft and delicate areas like brain tissue, force control capable of interacting with the environment is essential. The above demos have implemented force control using Admittance Control by attaching an F/T sensor to the end-effector of the handheld microsurgical robot.
Control of the end-effector fixation of a handheld robot
In microsurgery, such as eye surgery, which requires high precision and a Remote Center of Motion (RCM) inside the eye, the surgical capabilities can be enhanced through a six-degree-of-freedom manipulator. The above demo uses an EM Tracker sensor capable of detecting six degrees of freedom to fix the end-effector in space. Utilizing this research can enable safer microsurgery.
In microsurgery requiring Remote Center of Motion (RCM), it's necessary to design a robust six-degree-of-freedom manipulator as external forces are likely to be applied near the RCM. The above demo shows a video confirming that even when a force of about 5.0N is applied to the RCM of a six-degree-of-freedom manipulator, it still performs sufficiently well.
Fiber bundle Imaging



Previously, to assess tissue damage, it was necessary to cut and analyze the tissue. However, with our technology, it is possible to assess tissue damage in real-time without cutting. Additionally, by using mosaicking technology, we can expand the locally acquired images to a broader view.
Honeycomb Pattern Removal Using Convolution Neural Network (CNN)



In images acquired through fiber optic bundles, noise similar to a honeycomb pattern, as seen in the image on the left, is present. This noise presents challenges in applying feature-based image processing algorithms. To overcome this, we have proposed an image quality improvement algorithm based on Convolutional Neural Networks (CNN). Our research enables real-time noise removal from images obtained through fiber optic bundles
Real-time mosaicking based on feature points

By using an image quality improvement algorithm based on CNN to remove honeycomb-shaped noise, it is possible to perform real-time mosaicking based on feature points. This can overcome the narrow Field of View (FOV), which is a limitation of fiber optic bundles.
Micron
An Intelligent Handheld Instrument
Micron is a handheld instrument that actively cancels hand tremor during microsurgery. Micron can also aid fine manipulation for handheld OCT imaging, patterned laser photocoagulation, and membrane peeling.